磁驱动机器人的可编程液滴操作
材料科学中的液滴处理可有助于水收集,医学诊断和药物输送技术。虽然基于结构的液体操作已在自然界和受生物启发的人工材料中广泛使用,但实验室策略依赖于固定结构来进行单向水运动。在一项关于科学进步的新研究中安利和中国科学院大学化学研究所的研究团队提议开发一种磁控机器人。该构造物具有可调节的结构以分布阻力和确定液滴行为。该机器人可以运输,分裂,释放和旋转液滴,以在各种领域和恶劣环境中通用。新发现为自动液滴操作提供了有效的策略。
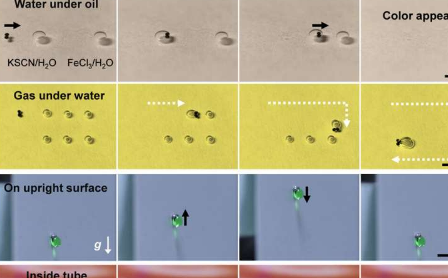
在这项工作中,李等人。使用可靠的方法,使用电磁驱动的机器人在可编程的磁场中控制钢珠,从而控制液滴。科学家通过调节磁场来控制机器人的结构。差异化的机器人结构导致了多种液滴行为组合,包括分裂,释放,旋转和运输。该机器人普遍适用于各种流体,包括水,石油和天然气。Li等。协助机器人在有限的空间,不平坦的表面上甚至在无水或厌氧条件下进行致动。这项工作在材料运输,微细加工和临床医学方面具有巨大潜力。
实验室内液滴的操作受自然界的启发。例如,植物和动物都显示在仙人掌雾收集系统,收集水蜘蛛丝和影响纳米布沙漠甲虫的行为,以收集和招喝水。用于水样收集的不对称和固有结构会在液滴中引起拉普拉斯压力梯度,从而导致沿预设方向运动。研究人员可以使用各种外部策略,包括电,磁铁,声学和润湿表面来激活其运动。其中,磁力具有远距离动作,安全和易于控制的优点。研究人员已经使用磁性粒子将水滴拖曳到疏水或有图案的表面以及磁响应材料上。
Li等。在磁力控制系统中将这两个钢珠称为“机器人”,并用食品添加剂对水滴进行着色,以明确识别不同的驱动方式。亲水(爱水)机器人很容易在接触时捕获液滴。研究团队转移了液滴,并通过减少或增加珠子之间的距离来调整其结构,以分裂子液滴或释放液滴。该过程主要依赖于其体积(V)影响结果的机器人结构。Li等。使用珠子到直径的中心距来量化机器人的结构(D / d)。例如,D / d比为1.67的机器人可以输送150 µL的水滴。但是,如果液滴扩大到350 µL,它将分裂。要了解这一点,
在控制了空气中的水滴后,研究小组在不同条件下(包括不同的气氛)对机器人进行了调查。例如,他们通过克服重力和不同液滴与基材之间的粘附力来拖动液滴以使其向上或向下移动。此类设备可在有限的空间中使用,例如对微流体和临床医学至关重要的盒子和管子。无损运输和精确的试剂控制对于定量化学微反应至关重要广泛应用于分析化学,诊断学和生物技术。例如,Li等。机器人通过可编程的液滴操作进行了连续的酸碱中和反应,以分裂子液滴并将其转移形成中性液滴。机器人提供了一条通用途径,可使用精确等分的试剂自动控制微滴,以进行微反应,这些试剂通常具有毒性,放射性或爆炸性。
然后,研究科学家在实验室中模拟生物医学过程,以探索机器人在体内医疗应用中的潜力。他们首先模拟了器官中发现的结石或矿物质沉积物例如肾脏和胆囊,由于结构上的局限性而无法手术切除,因此它们通常保持完整。他们使用微型机器人将药滴拖到模拟的结石上,以便易于收集和去除(基于两个表面之间的相容性)。在下一个实验中,他们展示了该机器人通过在冠状动脉中积聚大量胆固醇(用装满水的试管表示)来清除或清除血管的潜力。他们运输了药滴以捕获模拟的斑块,并溶解了药物,以供机器人处理。创新的方法可以为体内医疗应用提供多种功能。
这样,An Li及其同事提出了一种简单而通用的策略,即使用由两个钢珠制成的磁控机器人来操纵液滴。他们使用磁场控制结构,该磁场调节液滴前段和后段的阻力分布。他们实现了液滴的多种行为,包括运输,分裂,释放和旋转。除了操纵空气中的水滴之外,该机器人还有望输送复杂的液体,例如油,油包水和水包气。钢珠在有限的空间(包括有毒和放射性环境)中显示出液滴的可操纵性。这项工作在设备制造,传感和生物测定以及体内医学领域具有巨大潜力。研究小组认为,该系统的进一步优化将允许在纳升和皮升级别上进行较小的液滴操作,并增强生物相容性。